
Съдържание:
- Автор John Day day@howwhatproduce.com.
- Public 2024-01-30 07:52.
- Последно модифициран 2025-01-23 14:36.

Преди време публикувах своя Wifi PPM контролер. Работи доста добре. Само обхватът е малко кратък. Намерих решение на този проблем. ESP8266 поддържа режим, наречен ESPNOW. Този режим е много по -ниско ниво. Той не губи връзката толкова лесно и ако прекъсне връзката, той се свързва отново незабавно.
Използвам три ESP8266. Единият е приемникът ESPNOW, другият е изпращачът ESPNOW, а третият е точката за достъп, към която можете да се свържете. Третият е необходим, тъй като изпращачът ESPNOW не може да бъде точка за достъп по едно и също време. Добавих и някои антени, за да получа по -добър обхват.
Има втора точка за достъп директно към приемника. Ако се свържете с това, имате същото като със стария проект WifiPPM.
Добавих и поддръжка за приемник на протокол MSP. Това е "MultiWii сериен протокол", който се поддържа от MultiWii, Betaflight, Cleanflight и много други полетни контролери.
Стъпка 1: Списък на частите




Имате нужда от три модула ESP8266 от всякакъв вид. Но вие искате най -добрата гама. Затова предлагам да се използват модули ESP8266 с антени. Работи и без антени. Използвам следните части:
2 x ESP07 (ESP8266 модул с антенен конектор)
1 x ESP12
1 x 3dBi мини антена I-PEX U. FL IPX от страната на приемника
1 x ESP8266 2, 4 /5 GHz 3dbi Wlan Wifi антена SMA Stecker / мъжки + I-PEX адаптер от страната на подателя
3, 3 V захранване за всички модули ESP8266
Имате нужда и от компютър с Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 поддръжка за Arduino IDE. Следвайте тези инструкции: https://learn.sparkfun.com/tutorials/esp8266-thin… Библиотеката на Websocket за Arduino:
Стъпка 2: Изтеглете и прехвърлете скиците



Можете да изтеглите скиците тук.
Разархивирайте файла. Има три папки: Master-AP, Sender, Receiver
Master-AP: Това е скицата за точката за достъп. Отворете скицата с arduino IDE. Задайте честотата на процесора на 160 MHz в менюто с инструменти и качете скицата в ESP12.
Изпращач: Това е скицата за подателя на MSPNOW. Задайте честотата на процесора на 160 MHz и я качете на един от ESP07.
Можете да видите на първата снимка как да свържете модула ESP8266 за мигане.
Сега свържете ESP12 (точка за достъп) и Sender ESP07 серийни портове и захранващи връзки (втора снимка): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Стартирайте двата модула и се свържете с точката за достъп "Long-Range-WifiPPM/MSP". Паролата е "WifiPPM/MSP"
Отворете браузър и отворете IP адреса 192.168.4.1. Ще се появи контролния уебсайт. Кликнете върху бутона „Wifi информация“. Ще се появи поле за съобщение с MAC на изпращача и MAC на получателя.
Отворете скицата на приемника в Arduino IDE. Променете реда "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (трета снимка) до Mac адреса на изпращача, който се показва на уебсайта. Приемникът Mac трябва да е наред. Уверете се, че честотата на процесора е зададена на 160 MHz и качете скицата във втория ESP05.
Стъпка 3: Свържете приемника към контролера на полета и настройте Cleanflight



Сега свържете приемника към полетния контролер. Вашият полетен контролер трябва да има изход 3, 3 Volt с поне 200 mA. Ако не, имате нужда от допълнителен регулатор на напрежение 3, 3V.
Свържете GND на ESP към GND на полетния контролер. Свържете VCC на ESP към 3, 3V на полетния контролер или към допълнителния 3, 3V регулатор на напрежението.
Можете да използвате изхода PPM или серийния MSP изход.
За MSP изход свържете TX на ESP8266 към RX на всеки сериен порт на вашия полетен контролер. (Снимка 1)
За PPM изход свържете GPIO5 на ESP8266 към входа PPM на полетния контролер. (Снимка 1)
След свързване на ESP стартирайте полетния контролер и отворете чистия полет. Свържете се с мобилния си телефон към точката за достъп "WifiPPM/MSP". Паролата е "WifiPPM/MSP"
За MSP: Отворете раздела портове и задайте MSP на серийния порт, към който сте свързали ESP8266 (Снимка 2). Запишете и рестартирайте. Отидете в раздела за конфигуриране и настройте приемника на "MSP сериен приемник" (Снимка 3). Запазете и рестартирайте.
За PPM: Прочетете в ръководството на вашия полетен контролер как да настроите PPMG Отидете в раздела за конфигуриране и настройте приемника на "PPM приемник" (Снимка 4). Запазете и рестартирайте.
Следващата настройка е за двата приемника еднаква: Отидете на раздела приемник. Задайте каналите на "RTAE1234" (Снимка 5/Видео). Запазете настройката.
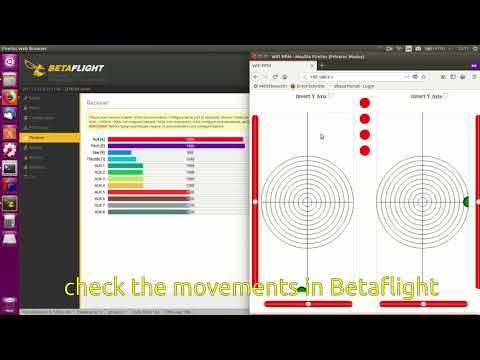
Сега отворете браузър на вашия смартфон. Отворете сайта 192.168.4.1 (Снимка 6). Сега можете да проверите контролера.
Ако работи, стартирайте двата подателя ESP8266. Свържете се с точката за достъп "Wi -FiPPM/MSP за дълги разстояния". Паролата е „WifiPPM/MSP“. Отворете отново уебсайта 192.168.4.1. Проверете отново в cleanflight дали работи.
Свържете антените към модулите ESP07.
Стъпка 4: Повече информация

При нормална работа има две точки за достъп. Точката за достъп "WifiPPM/MSP" е като предишния проект WifiPPM. Можете да го използвате, ако просто искате да направите бърз полет, без да свързвате допълнителни модули, когато не се нуждаете от връзка на дълги разстояния. Ако се свържете към „WifiPPM/MSP с дълъг обхват“, контролерът за дълги разстояния поема контрола.
Може би искате да знаете колко дълго е „далечен обхват“. Всъщност наистина не знам. Това е поне няколкостотин метра. Но досега не можех да го тествам. Не губи връзка в пълния ми апартамент.
Добавих MSP контрол, защото мислех, че мога да направя заден канал за телеметрични данни. Но това никога не работи стабилно. Както и да е, протоколът MSP е по -точен от ppm, защото не зависи толкова от времето. Може би това прави проблеми с бавните полетни контролери, защото има голям трафик на серийния порт. С моя контролер за полети Noxe F4 работи без проблеми.
Ако имате някакви проблеми с конфигурацията, погледнете стария проект WifiPPM.
Препоръчано:
Как да хакнете температурен сензор за по -дълъг живот на батерията: 4 стъпки

Как да хакнете температурен сензор за по-дълъг живот на батерията: Inkbird IBS-TH1 е чудесно малко устройство за регистриране на температура и влажност за няколко часа или дни. Той може да бъде настроен да регистрира всяка секунда до всеки 10 минути и отчита данните през Bluetooth LE на смартфон с Android или iOS. Приложението
Дълъг обхват, 1,8 км, безжична комуникация между Arduino и Arduino с HC-12 .: 6 стъпки (със снимки)
")
Дълъг обхват, 1,8 км, безжична комуникация между Arduino и Arduino с HC-12 .: В тази инструкция ще научите как да комуникирате между Arduinos на дълги разстояния до 1,8 км на открито. HC-12 е безжичен сериен порт комуникационен модул, който е много полезен, изключително мощен и лесен за използване. Първо ще напуснеш
Безжичен сензор за температура и влажност на IOT с дълъг обхват с Node-Red: 27 стъпки

Безжичен сензор за температура и влажност на безжична връзка IOT с Node-Red: Представяме на NCD безжичния безжичен сензор за температура и влажност на въздуха, който може да се похвали с обхват до 28 мили, използвайки безжична мрежова архитектура. Включването на сензор за температура и влажност на Honeywell HIH9130 предава високо точна температура и
Безумен електрически дълъг борд с палуба от въглеродни влакна: 6 стъпки (със снимки)
")
Insane Electric Longboard Budet с палуба от въглеродни влакна: хей, преди да говоря за себе си и защо реших да отида на това пътуване, бих искал да кажа, моля, проверете моя видеоклип за епичен ездачен монтаж и моите практики да направя също важно, моля, абонирайте се за него наистина ще помогне на курса ми в колежа, защото
Телбод с дълъг обхват - Направете сами: 9 стъпки

Телбод с дълъг обхват - Направете сами: Ако трябва да направите книжка, имате нужда от телбод с дълъг обхват. Те могат да струват няколко пъти повече от стандартния телбод за маса. Офисът, в който работя сега, е показан тук. Преди няколко години работех в офис, където нямаше пари за